





Everyone knows how a bike stays upright — the gyroscopic forces induced by the spinning wheels, and the “castor effect” created by trail. Or do they? A team of engineers says it's proven that bikes can stay upright even without these things.
- How to choose road bike geometry
- Pushing the limits of fork offset: an experiment
- Recent progressions in mountain bike geometry
While it’s been generally accepted for decades that they are the two factors keeping your bike upright, English-born engineer Jim Papadopoulos and his colleagues suggest that a bike will be stable even if these two forces aren’t present.
Papadopoulos believes that two well-accepted studies from the 20th century on the self-stability of bikes contain mistakes. He's been working with an international team of four engineers (J.D.G. Kooijman, J.P. Meijaard, Andy Ruina and A. L. Schwab) to prove in the real world that a bike is self-stable even without the influence of these two forces. To cancel out the gyroscopic effect, they used counter-rotating wheels on a test-bike, and to eliminate the stabilising effect of trail, they made the trail negative.
“Our work,” says Papadopoulos, now an assistant teaching professor at the Northeastern University in Boston, “was about finding the correct equations and proving that widely accepted assertions were not precisely true. Therefore, we encourage designers to play with formerly forbidden limits like negative trail and vertical steering. This is not necessarily better, but neither should they assume it must be worse.”
So what exactly are gyroscopic forces and fork trail?
The gyroscopic effect is the tendency of a spinning wheel to resist tilting. In fact, it’s a little more complicated than that: when you attempt to move a spinning wheel in one dimension it will exert a reaction force that tries to move it in a different dimension. In 1910, the mathematicians Felix Klein, Fritz Noether and Arnold Sommerfeld wrote a four-volume book on gyros, in which they argued that the gyroscopic effect is what causes a bike to be self-stabilising in motion.
In 1970, the British chemist and writer David Jones built a bike with no gyroscopic effect, and he concluded that the self-stability of a bike is due to fork trail
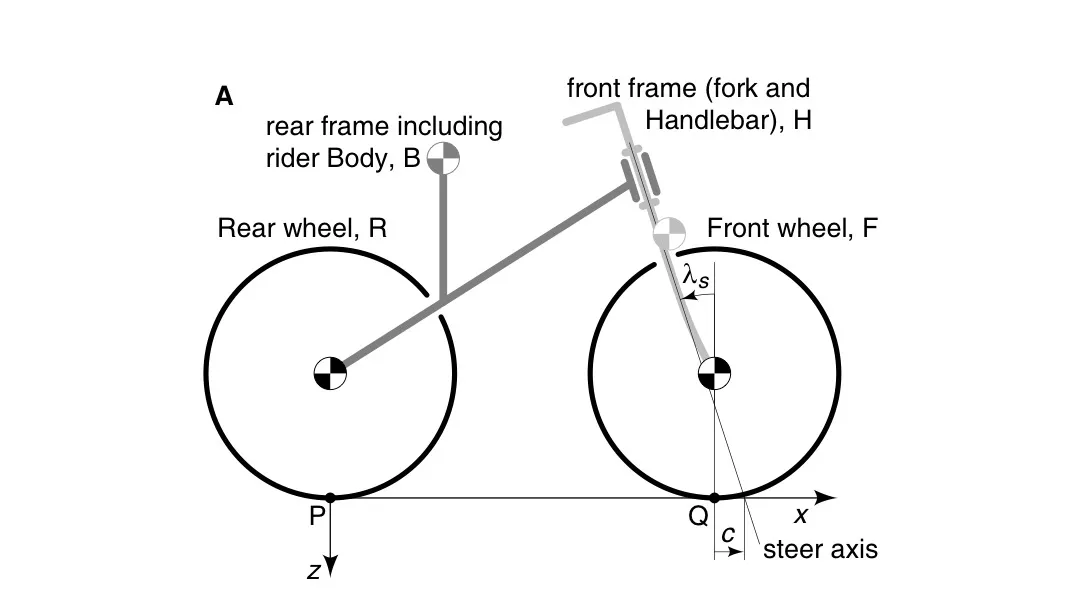
Fork trail, on the other hand, is something we can witness on grocery carts. If you move the cart in any direction, the castor (comprising a steering axis and a wheel) will always follow the cart, like a dog on a leash. This happens because the contact point to the ground of the wheel is behind the contact point to the ground of the steering axis, a distance also known as “trail” (labelled 'C' in the illustration above). It is as if the axis were towing the wheel in its movement.
The interesting thing in relation to bikes, which only have two contact points with the ground, is that this means the front wheel automatically goes into a turn when a moving bike leans — it is self-correcting. In 1970, the British chemist and writer David Jones built a bike with no gyroscopic effect, and he concluded that the self-stability of a bike is due to fork trail.
However, Papadopoulos and his team say that there are errors in both studies mentioned above (1910’s Über die Theorie des Kreisels on gyroscopic effect on bikes’ self-stability by Felix Klein, Fritz Noether and Arnold Sommerfeld; and 1970’s The Stability of the Bicycle on the castor effect by David Jones). In the earlier study from 1910, the team says that there were sign errors that — when corrected — lessen the importance of gyroscopic forces. And in the later study by David Jones, the team says that his calculations were based on a bicycle being stationary, rather than moving.
The team’s efforts culminated in two papers, the more theoretical Linearised Dynamics Equations For The Balance And Steering Of A Bicycle: A Benchmark (2007), and the more practical and mind-blowing A Bicycle Can Be Self-Stable Without Gyroscopic or Castor Effects (2011).
What else might be helping your bike stay upright when in motion?
This is where it gets complicated, as there’s no common agreement on the exact relation of the different factors that help keep a bike upright when in motion. It’s an exciting area of bike design theory, and incredible to think that despite the safety bicycle emerging in the late 19th century, the exact relationship between these forces still isn’t known for certain.
In addition to gyroscopic forces and fork trail, there’s also centre of mass, which is one of the key areas highlighted by Papadopoulos and colleagues. You may have noticed that it’s much easier to ride a bike no-handed when it has a long stem fitted — that’s because the weight of the handlebars is further ahead of the front wheel. And don’t forget wheelbase length, which helps keep your bike stable at speed.
“If you look at the bicycles of today,” says Prof. Arend Schwab, one of the report’s co-author’s and a biomechanical engineer at Delft University of Technology in the Netherlands, “they look almost identical to the ones made around 1890, when scientists first looked at the self-stability of the bike.”
The bicycle started evolving around 1820 with Karl Drais and his model the dandy-horse, or the draisine. These looked very different from the “safety bicycles” that arrived around 1890. With equally sized wheels, a chain drive and pneumatic tyres, the safety bicycle looked very similar to the bikes we still ride today: what we are used to calling ‘diamond-frame’ bikes or ‘double-triangle’ frames.
You could argue that the reason why this hasn’t changed much is because those designers got it pretty much right a hundred years ago. Sure, mountain bike builders have been playing with more extreme geometry, altering head angle, fork offset and wheel size, all of which affect trail, but the road bike frame hasn’t changed much in basic layout or geometry. Though the safety bicycle did lack a solid seat tube to begin with.
The important thing to note from all this, however, is that according to Schwab, any stable bike design can be made unstable simply by changing one of the key parameters (gyroscopic effect, fork trail, mass distribution). Moreover, most unstable designs can be made stable simply by tweaking the same three parameters.
The slow pace of change
Why bicycles do not fall
The reasons for the slow rate of development are essentially twofold. Firstly, the double-triangle frames (which have one triangle in the front composed of top tube, head tube, down tube and seat tube, and one in the back from the chain and seat stays) are very strong compared to any other kind of frame. Secondly, cycling’s governing body the UCI has established that road race bikes must be manufactured this way, so the market has largely followed suit.
“For the general purpose of cycling,” Schwab adds, “it’s a good design and it works. It’s the human size, it’s practical, not too big, not too heavy. But there is room for improvement and the family of bicycles is bigger than what we have seen so far.”
In a TED talk from 2012 (above), Schwab discusses the research mentioned above, and concludes by saying: “My vision is that with careful experiments and validated computer models, we can move past this 19th century bicycle evolution, into a 21st-century bicycle revolution.”
One example he gives is for creating more stable designs that can help the elderly avoid falling off when riding their bike.
Some new designs
Despite the team's excitement, its findings are not well accepted by the cycling establishment — yet.
“Manufacturing is not a science”, Papadopoulos continues. “For almost any innovation the company would like to see customers buy a new product. Manufacturers are only rarely innovators, in any meaningful sense. At least, that is my perspective from outside the industry. They want to make a profit. And we are not showing them a working product, but only ideas.”
However, Papadopoulos and his team proved that both of the previous studies were not precise. Their latest findings are now being greeted by those within the bike building industry with both enthusiasm and some hesitation.
“The theory is amazing,” says Phil Dempsey, Engineering Manager for UK bike brand Aprire, “and the equations look like they worked, but the design, at the moment, would be too radical for the consumer.”
Markus Storck, founder of Storck Bicycle, agrees that the research is interesting from an engineering standpoint, but will probably not change the way that most bikes are designed. He points to the real-world need for central weight distribution in particular.
“Everyone who’s spun their rear wheel on a mountain bike when going uphill knows exactly how important weight distribution is, even a centimetre or so can make a big difference. Equally, going downhill on a road bike, a rider needs to get their weight back in order to be stable.” He says that, for him, bike designers “got it right first time with the safety bicycle”.
The rideable designs floated by Schwab et al include a bicycle which steers from the rear wheel, mentioned in the TED talk above (around 14 minutes in). Papadopoulos asserts that an experienced rider can get the hang of this contraption in a couple of minutes, and he adds that it creates possibilities for building more stable bikes that can help reduce the number of people falling off their bike.
As you can see in the photo above though, the wheels are very different sizes, and it’s hard to say whether this design will be any more comfortable or efficient for a well-trained rider. Which brings us back to an earlier point — that bike design hasn’t fundamentally changed in more than a hundred years, and not just because we don’t fully understand the physics involved. It could also be that the original ‘safety bicycle’ design was so good, it suited the needs of most people.
Not that this deters Papadopoulos, however. “Bike design in the last decades has remained quite archaic compared to other technologies from other industries such as military or automotive”, he adds. “That’s our problem as engineers, we get stuck and we’re not progressing and that’s why bike design has stayed where it is.”
For further reading on the project, head to the Bicycle Dynamics webpage maintained by Prof. Arend Schwab.

